![]()
- CADモードでのパートの作成
- ロボットアームのハンド部をモデリング
![]()
前回に続き、ロボットアームをNURBSを使ってモデリングしていきます。
前回は以下のところまでモデリングしました。

今回で全体のモデリングを完了させるところまで進めていきます。
前回で使用した機能については、流れだけ説明を行い手順の詳細は省いています。
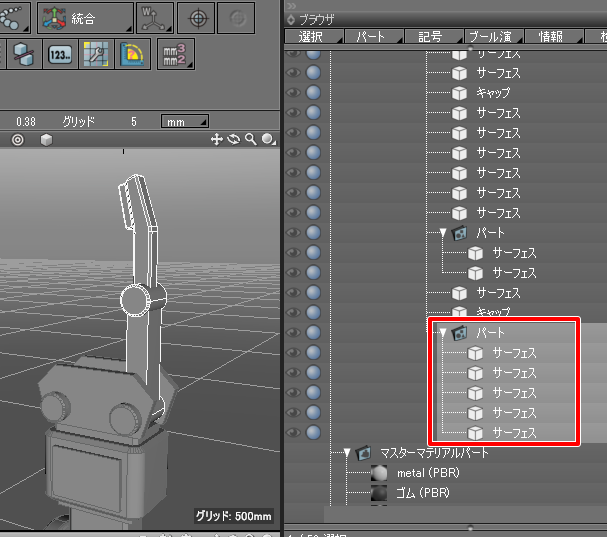
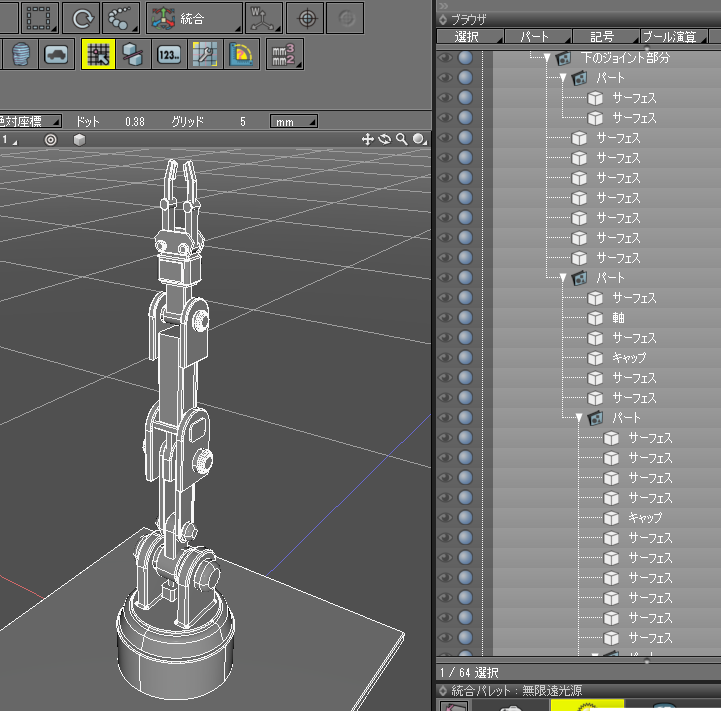
CADモードでのパートの作成
ロボットアームのモデリングではたくさんのNURBSサーフェスが作成されます。
ブラウザでグループ分けして管理しないとどの位置にある部品か判別が難しくなるため、パートで整理しながらモデリングしていくことになります。
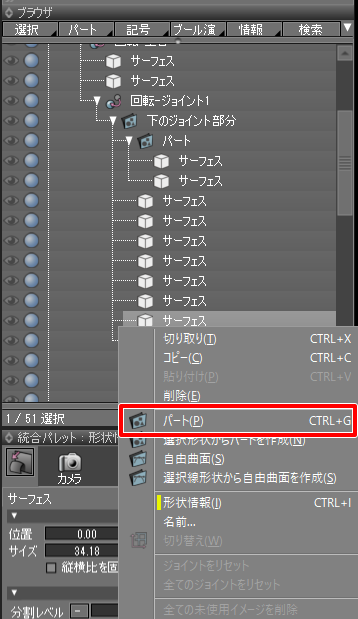
CADモードでのNURBSモデリング時は、ツールボックスからはパートを作成できません。
3DCGモードに切り替えるとツールボックスの「パート」-「パート」からパートを作成できますが手間がかかります。
この場合はCADモードのまま、ブラウザで右クリックしてポップアップメニューを表示し、「パート」を選択するようにします。
ロボットアームのモデリング工程ではブラウザでの操作はほとんど出てきませんが、
その都度パートを作成して整理しつつ進めていっています。
2つめのアーム部をモデリング
2つめのジョイントの上にアームを付けていきます。
1つめのジョイントに繋げたアーム部は端が半円のスロット形状を使用しましたが、今回は直方体で形作っています。
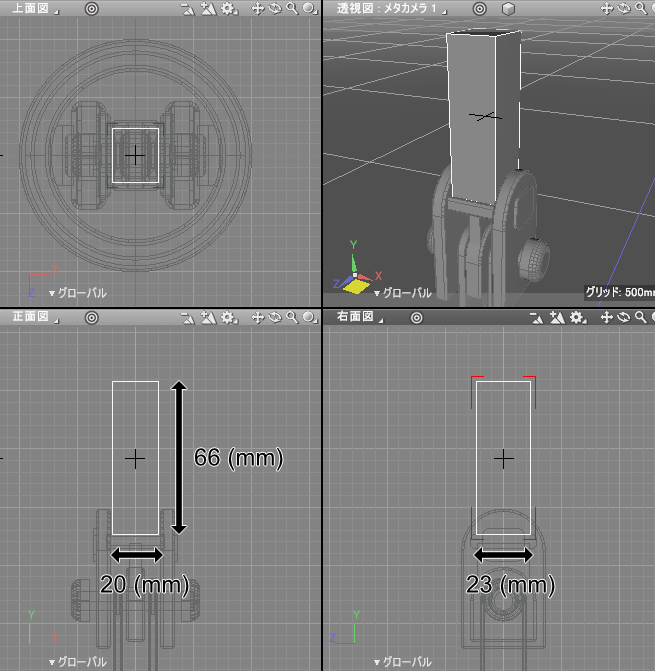
20 x 66 x 23(mm)の直方体を配置しました。
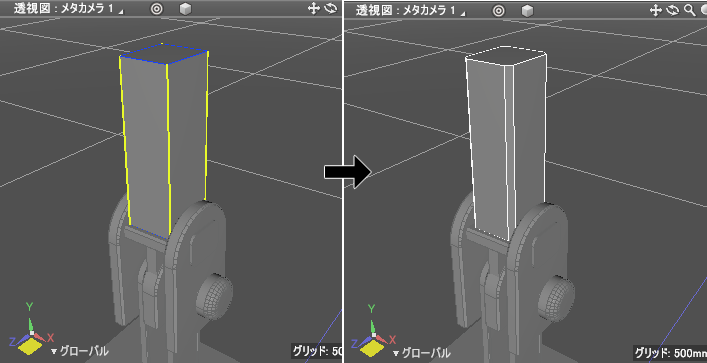
形状編集モード+稜線選択モードで四隅の稜線を選択し、2(mm)の面取りを行いました。
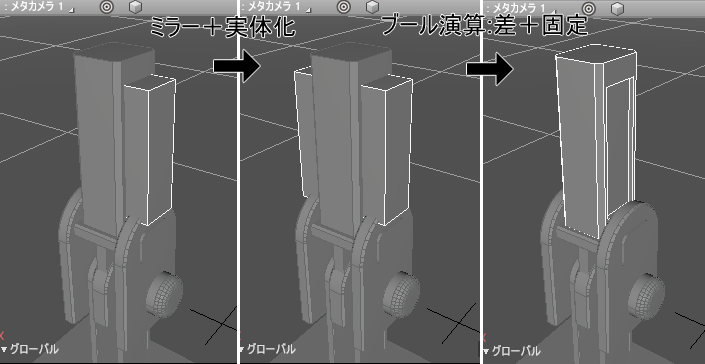
装飾として側面に窪みを付けます。
側面に少し重なるように直方体を配置し、「ミラー」でX軸対称にして実体化。
「ブール演算:差」でミラーを行ったNURBSサーフェスで削り、「ブール演算を固定」しました。
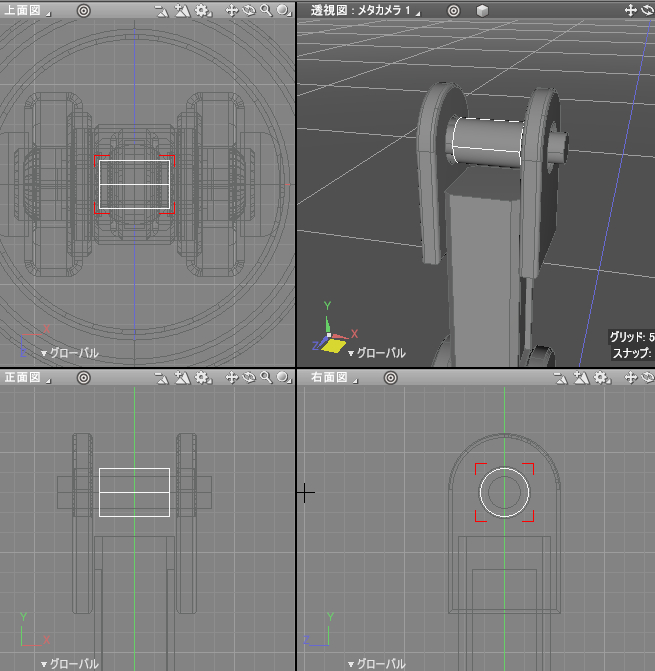
ハンド部をつなぐ接続部をモデリング
アーム部とハンド部をつなぐ接続部をモデリングします。
右面図で、28 x 45(mm)の長方形を配置します。
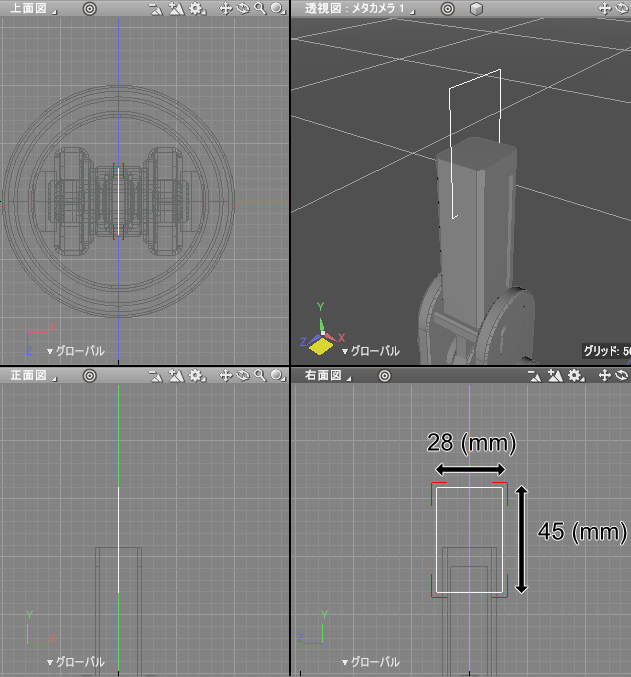
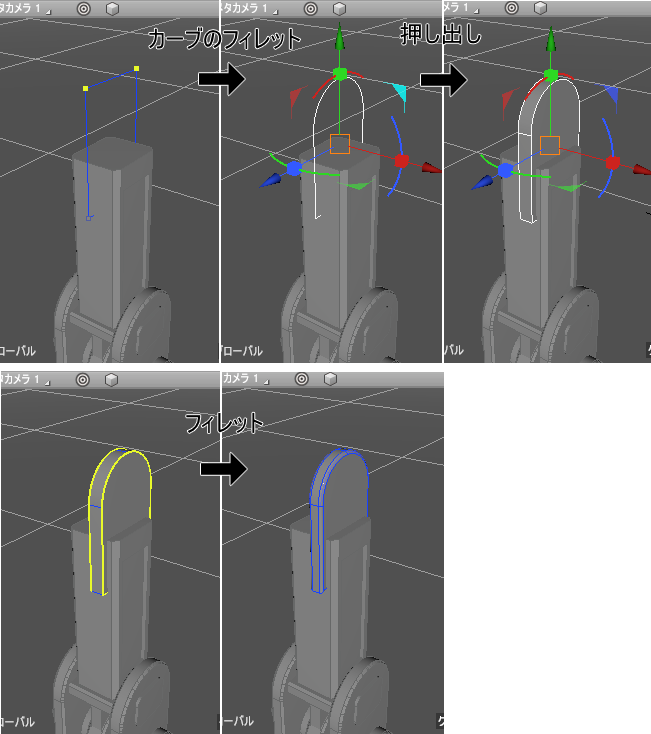
形状編集モードで上の2つのコントロールポイントを選択し、「カーブのフィレット」で幅の半分(28/2 = 14(mm))の距離でフィレットを適用して半円にします。
「押し出し」で5(mm)+X軸方向に押し出しました。
この形状の角を形状編集モード+稜線選択モードで選択し、「フィレット」を1(mm)で適用しました。
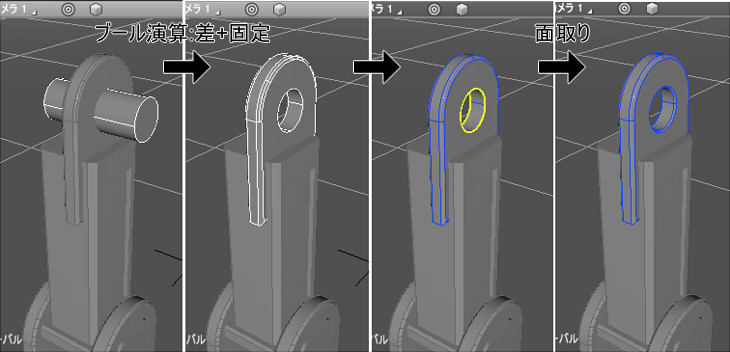
半径6(mm)(=直径12(mm))の円柱を配置し、作成したNURBSサーフェスの形状を貫くようにします。
「ブール演算:差」と「ブール演算を固定」でNURBSサーフェスに穴を開け、穴の周囲の稜線を選択して0.5(mm)の面取りを行いました。
正面図でこのNURBSサーフェスを+X方向に移動し、X軸対称でミラーを行い実体化しました。
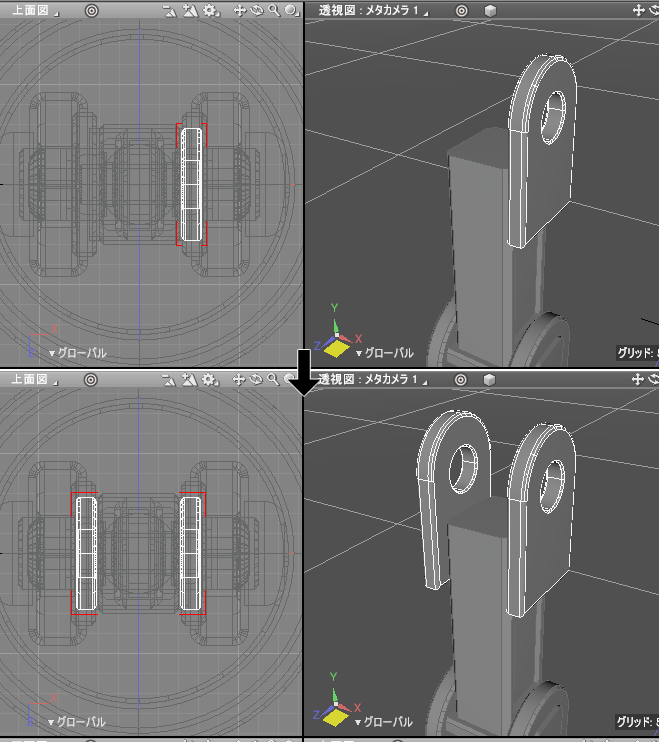
半径4(mm)の円柱をミラーリングした形状の穴の部分に通します。
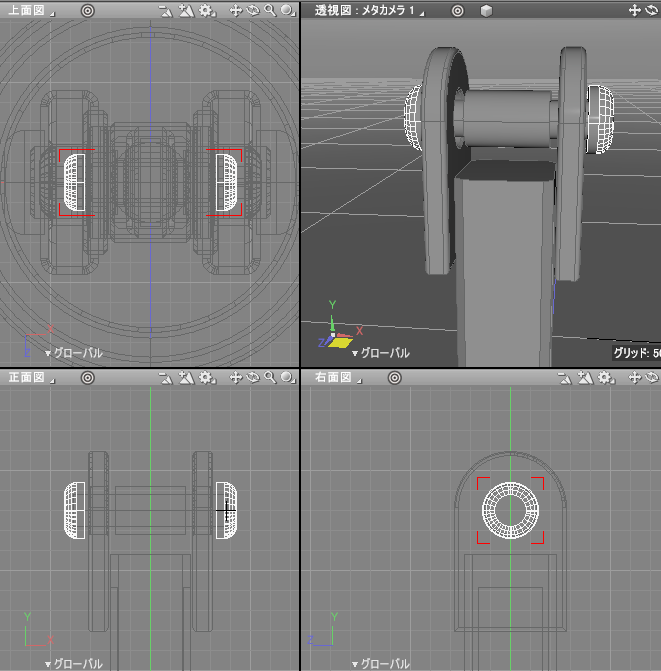
半径6(mm)、高さ18(mm)の円柱を中央に配置しました。
細い円柱の端にキャップを配置します。
端に円柱を配置し、外側をフィレットして丸めます。
円柱の半径を7(mm)、高さを5(mm)としました。
フィレットは3(mm)の数値を指定しました。
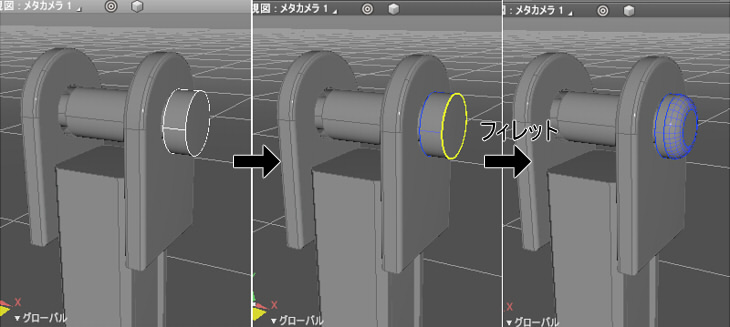
X軸対称でミラーを行い実体化しました。
ハンド部をモデリング
ハンド部をモデリングしていきます。
16 x 20 x 9(mm)の直方体を中央の円柱の上に少し重なるように配置しました。
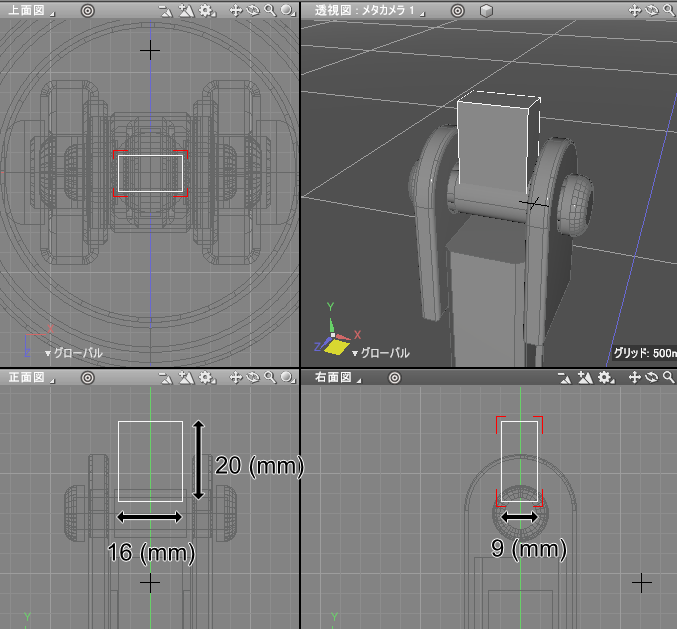
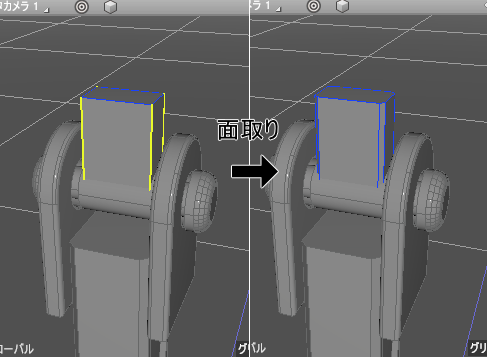
4隅の稜線を選択し、1(mm)で面取りしました。
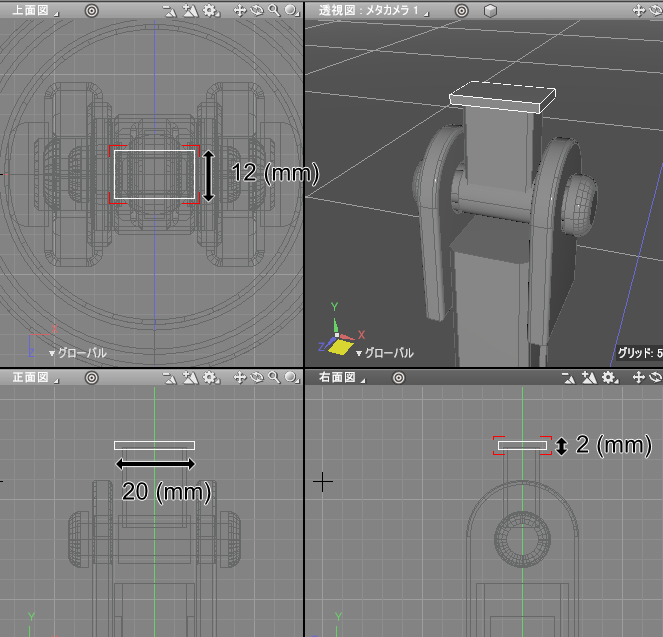
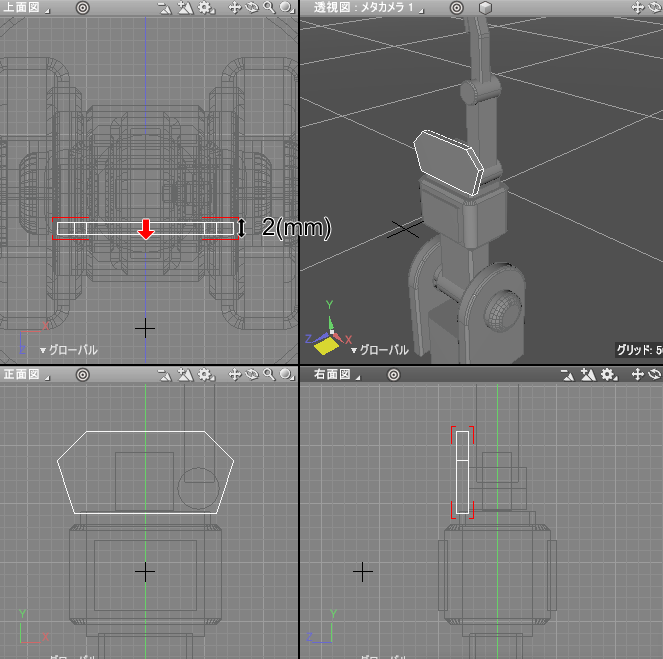
この上に20 x 2 x 12(mm)の直方体を配置しました。
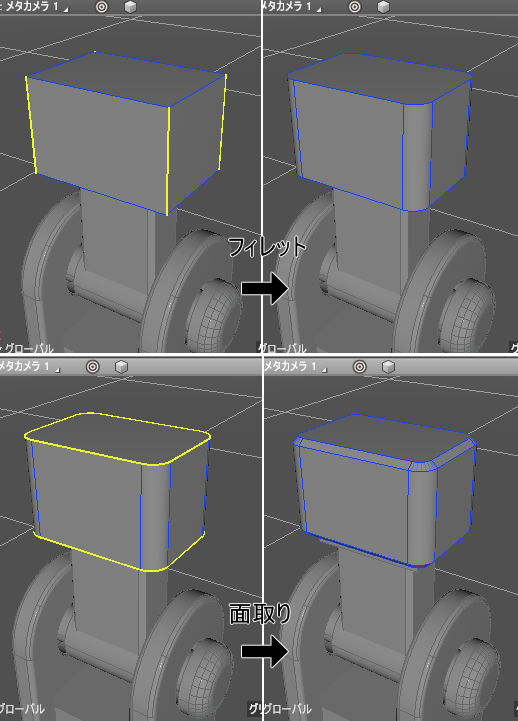
この上に26 x 17 x 18(mm)の直方体を配置しました。
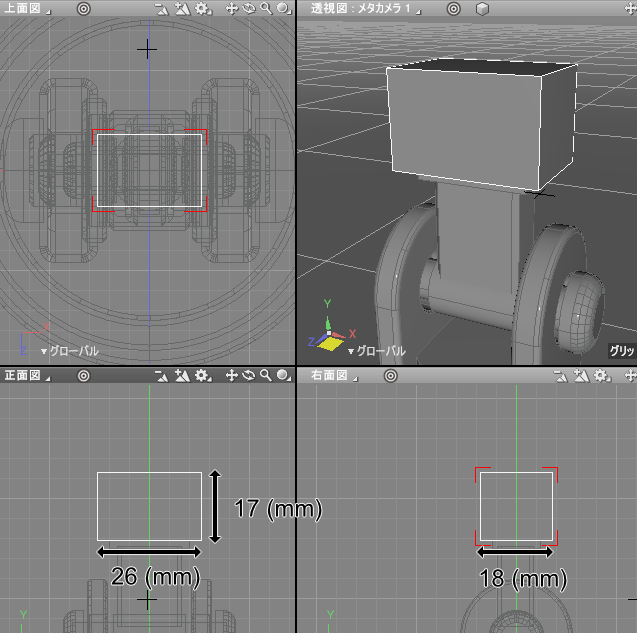
四隅の稜線を選択し3(mm)でフィレット、フィレットを固定、上下の稜線を選択し1(mm)で面取り、面取りを固定しました。
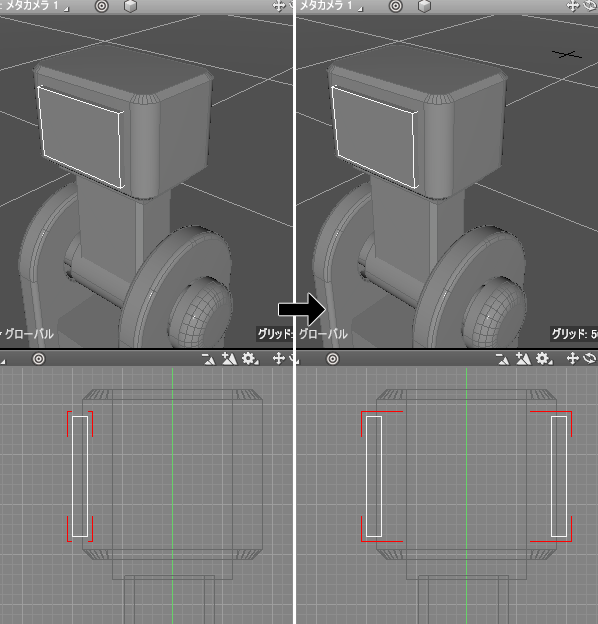
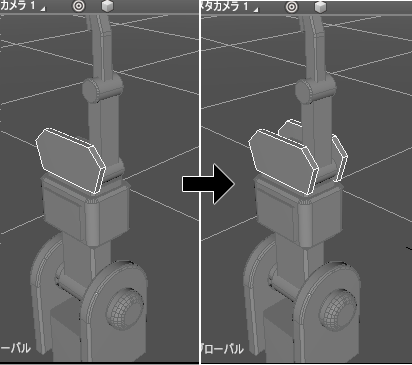
装飾として、このNURBSサーフェスのZ軸方向の前後に薄い直方体を配置します。
Z軸対称にミラーを行い実体化しました。
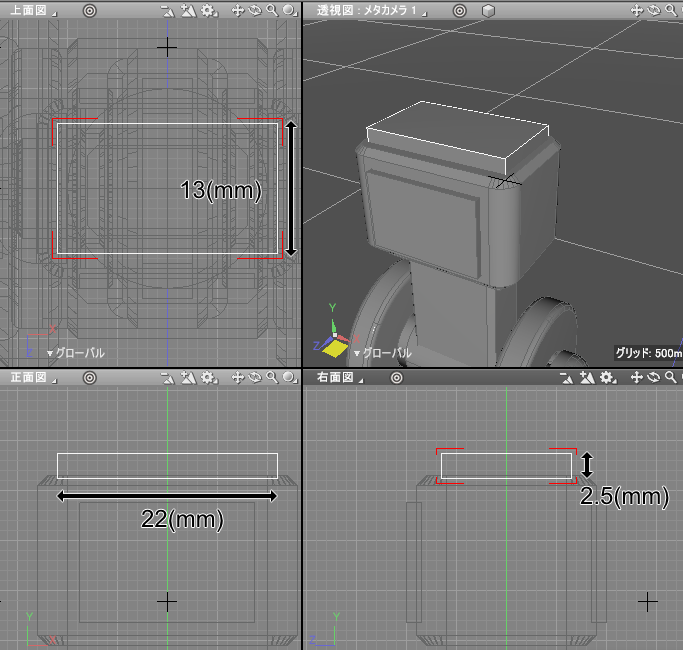
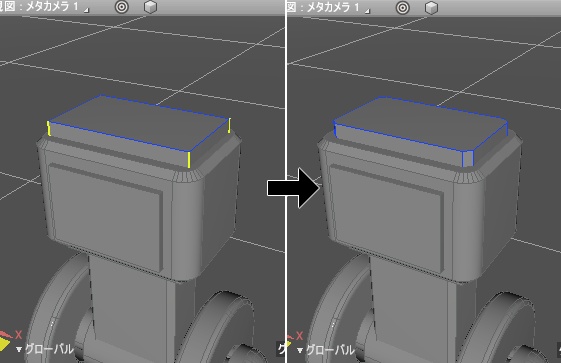
上に22 x 2.5 x 13(mm)の直方体を配置し、4隅を1(mm)で面取りしました。
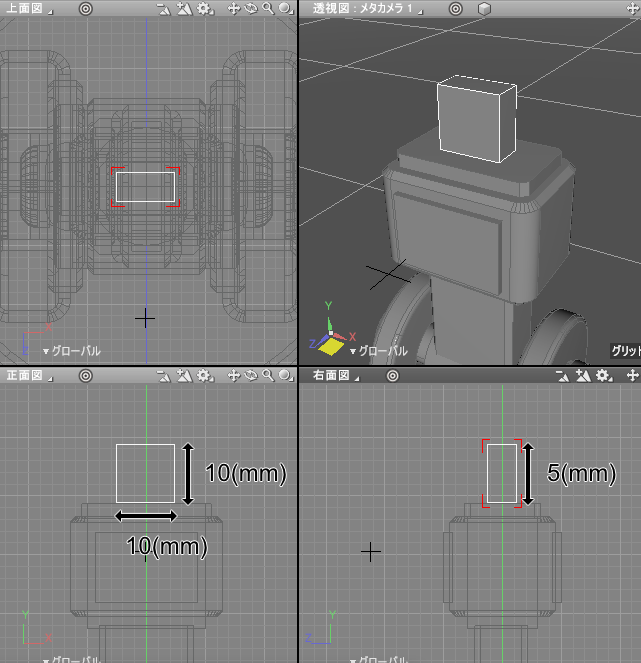
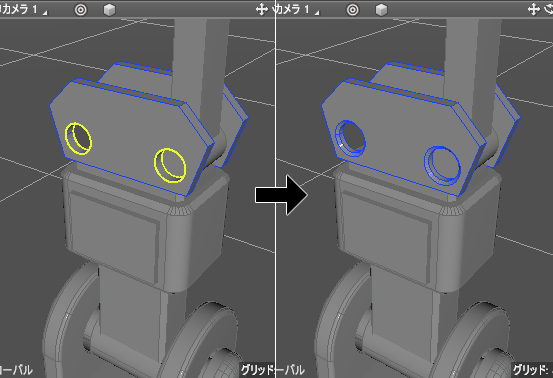
ハンド部の先端(片側)をモデリング
ハンド部の先端は以下のように構成しています。
隠れている部分は目立たないため、単純な円柱と直方体で表現します。
10 x 10 x 5(mm)の直方体を配置しました。
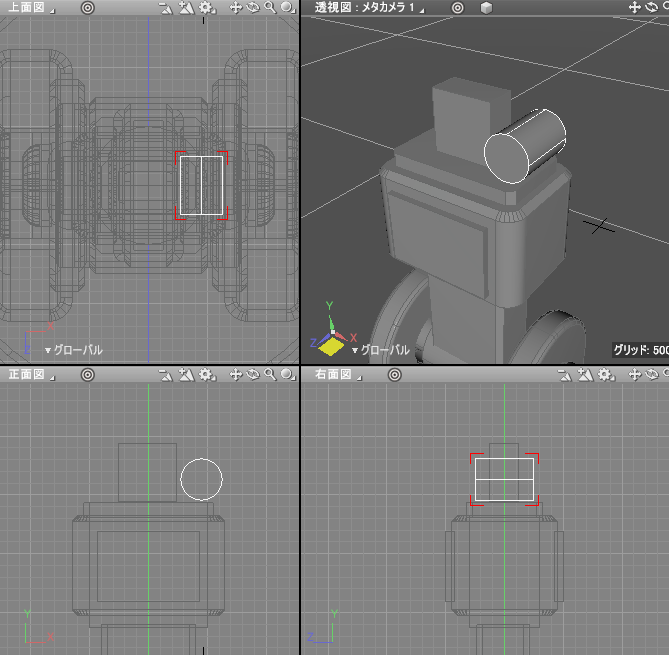
以降はハンド部を片側だけ作り、X軸対称で実体化することにします。
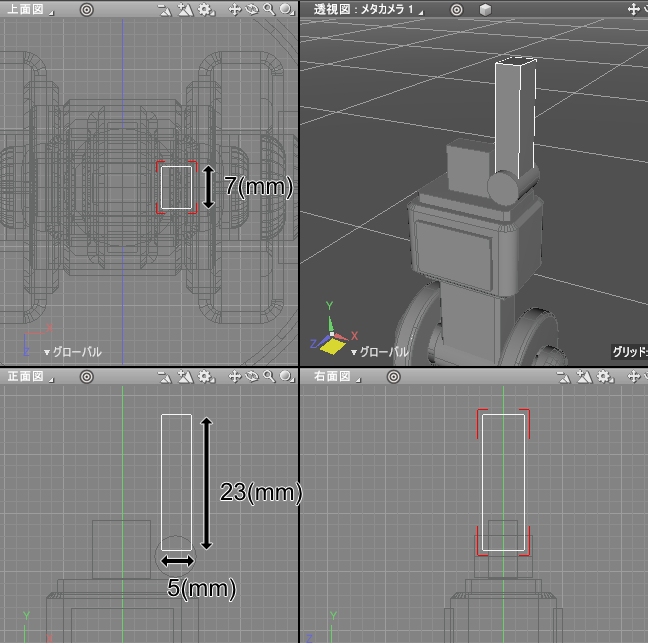
半径3.5(mm)(= 直径7(mm))、高さ10(mm)の円柱をZ軸方向が高さとなるように配置します。
X=0の位置から+X方向に移動させています。
5 x 23 x 7(mm)の直方体を円柱の上に配置しました。
半径3.5(mm)、高さ10(mm)の円柱を複製し、直方体の先端に移動させます。
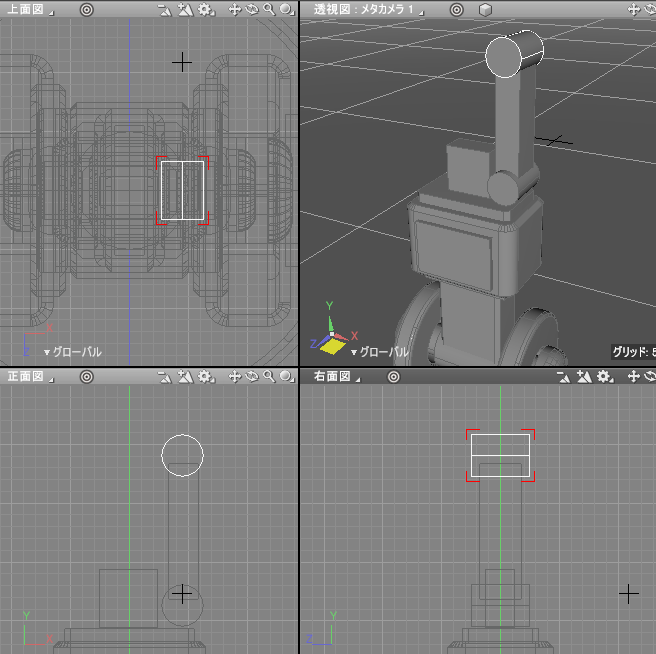
この円柱の円の稜線を選択して、0.5(mm)で面取りしました。
先端の挟むNURBSサーフェスは、「カーブ」で形作ってから厚みを付けて立体化します。
ツールボックスの「作成」-「カーブ」を選択し、正面図で6点を指定して閉じたNURBSカーブを配置しました。
作成時は大まかに配置を行い、形状編集モードにしてコントロールポイントの位置をマニピュレータを使って微調整して整えていきます。
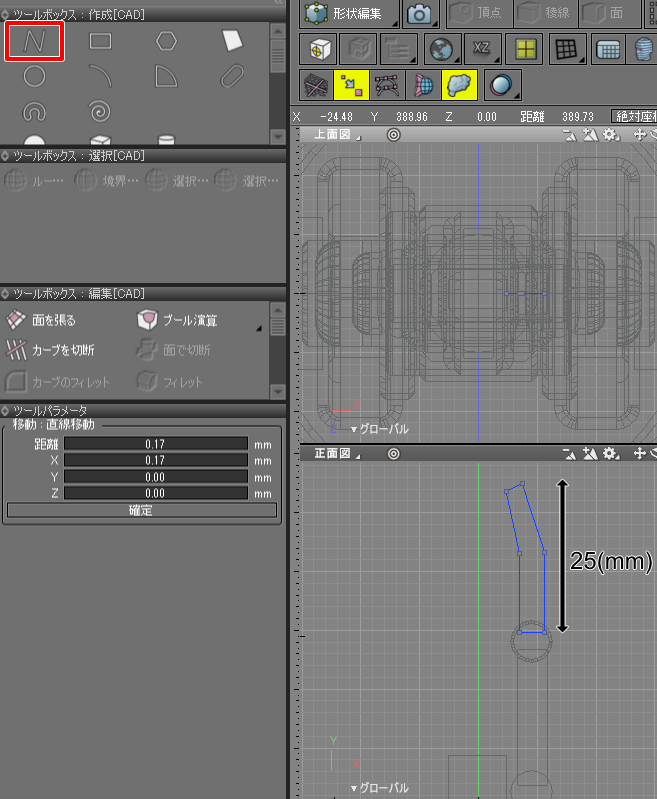
右面図で押し出しを使用して4(mm)厚みを付けました。
また、形状情報ウィンドウのバウンディングボックスの位置Zを0にして、右面図で見てNURBSサーフェスが中央に来るようにしています。
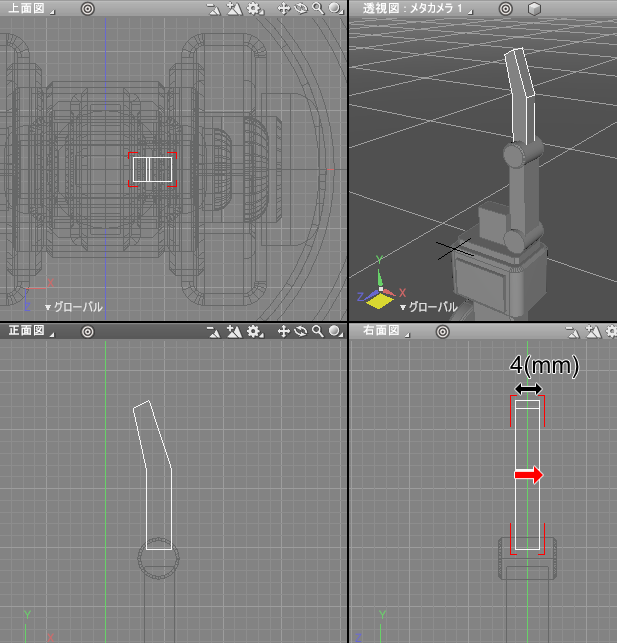
角の稜線を選択し、0.5(mm)で面取りしました。
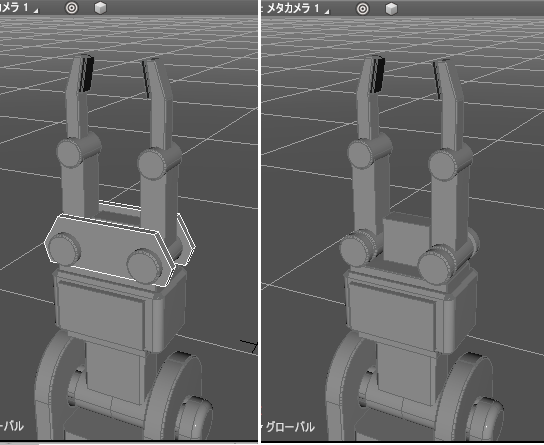
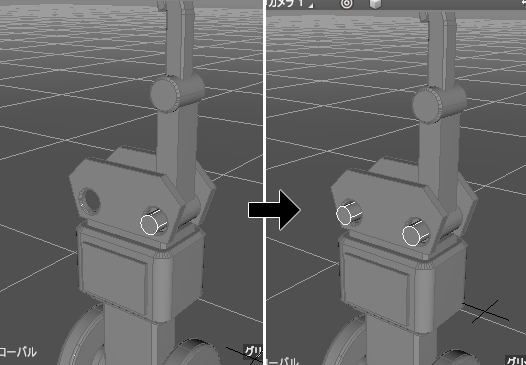
先端のゴムをモデリング
先端のつかむ部分までNURBSサーフェスでモデリングできました。
このつかむ部分でゴムのマテリアルを与える直方体を配置します。
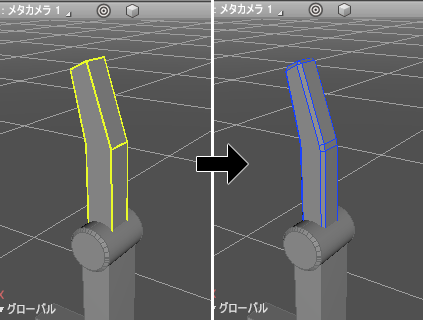
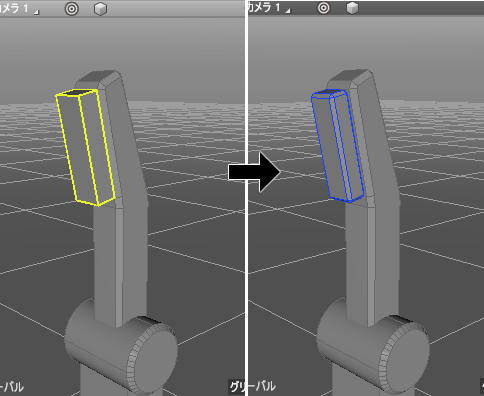
形状編集モード+面選択モードで以下のように透視図で面を選択します。
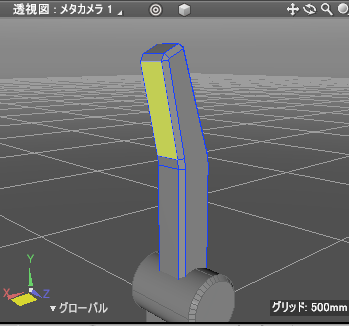
ツールボックスの「編集」-「面の取り出し」を選択すると、選択面が別のNURBSサーフェスとして複製されます。
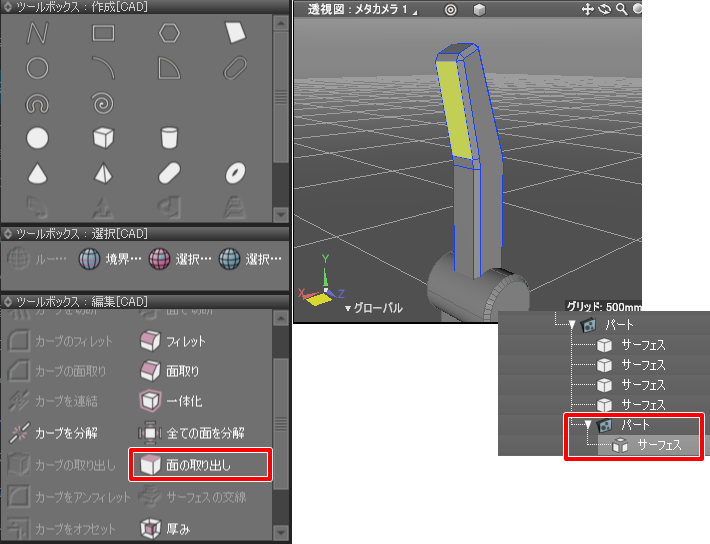
ここでは1枚の面を選択しているため、開いたNURBSサーフェスとなりました。
ツールボックスで「編集」-「厚み」を選択し、ツールパラメータで2(mm)の距離を指定しました。
逆向きに厚みがかかる場合は「内側」チェックボックスをオフにします。
「厚みを固定」ボタンを押して、厚みを確定します。

透視図では、先端の形状の内側にぴったり引っ付いた形で直方体が配置されました。

形状編集モード+稜線選択モードで角の稜線を選択し、0.3(mm)で面取りしました。
ハンド部の手の甲に相当する形状をモデリング
ハンド部の手の甲に相当する形状をモデリングします。
長方形のNURBSカーブを変形させて押し出しで厚みを付け、Z軸対称でミラーすることで作成することにしました。
30 x 14(mm)の長方形を配置します。
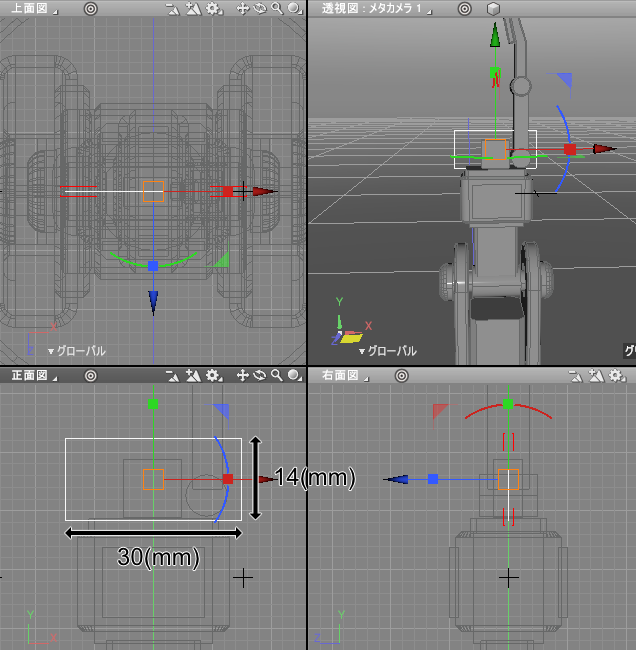
形状編集モードで上の2つのコントロールポイントを選択し、「カーブの面取り」で5(mm)の面取りを行いました。
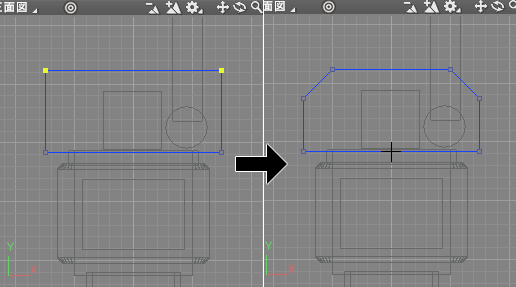
一番下の2つのコントロールポイントを選択し、マニピュレータを使ってX軸方向に少し縮小させます。
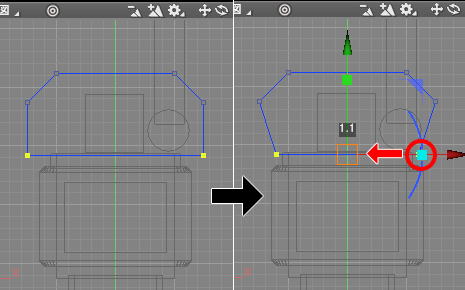
押し出しで2(mm)の厚みを付け、+Z方向に移動しました。
Z軸対称でミラーを行い実体化しました。
この形状の左右に穴を開けます。
正面図で見て、内側の円柱の中心に一致するように、かつ、この形状を貫くように円柱を作成します。
ミラーでX軸対称にして実体化しました。
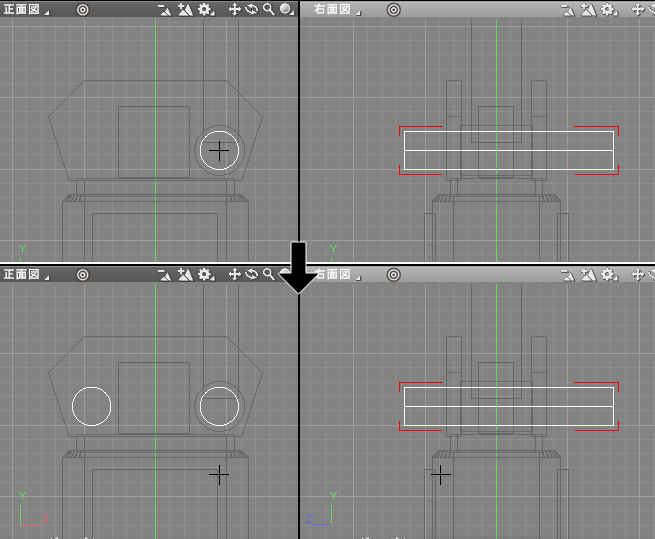
「ブール演算:差」でNURBSサーフェスにこの2つの円柱で穴を開けて「ブール演算を固定」しました。
不要な形状を削除して整理すると、この部分は2つのNURBSサーフェスとなりました。
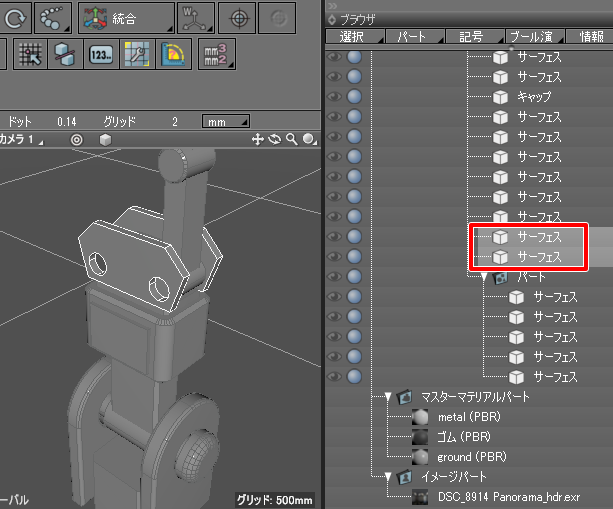
穴の周囲の稜線を選択し、0.5(mm)で面取りしました。
正面図で見て左右のどちらかに穴を通る円柱を通して、ミラーでX軸対称にして実体化します。
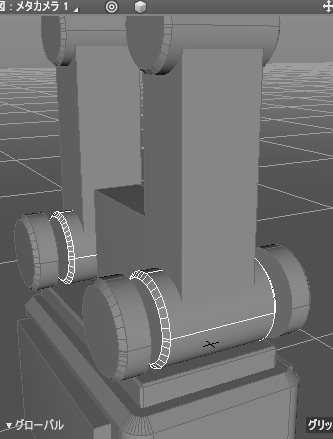
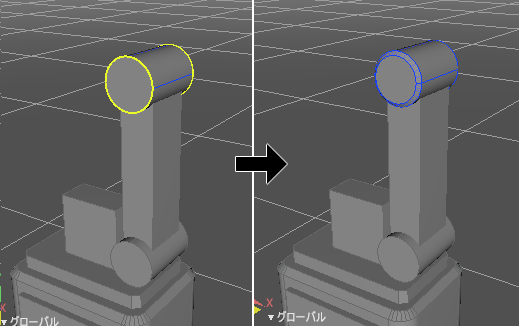
円柱の先端部分にキャップを付けます。
半径3.5(mm)(= 直径7(mm))、高さ2(mm)の円柱を配置します。
外側の円の稜線を選択し、0.5(mm)で面取りを行います。
Z軸対称にミラーを行って実体化、X軸対称にミラーを行って実体化します。
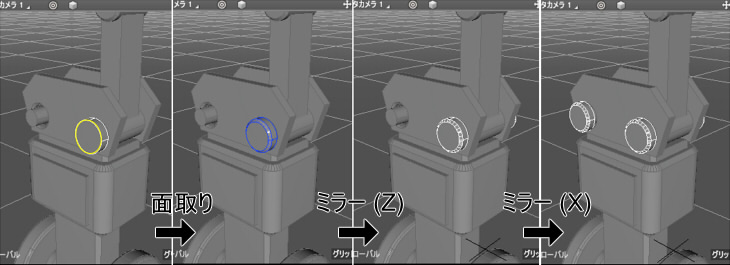
これで4か所にキャップをかぶせることができました。
ここまでで以下のようにモデリングできました。
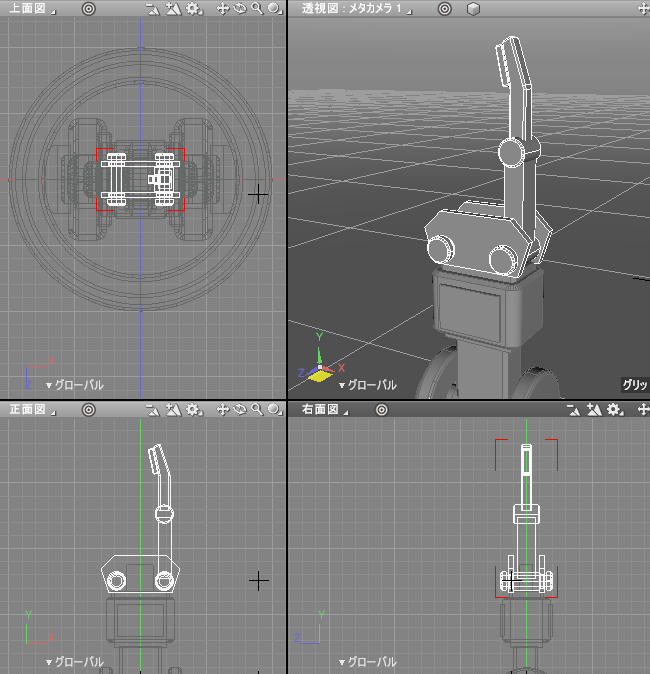
アーム先端の片方を180度回転させて複製
アーム先端をパートに入れてまとめます。
この部分は、パートを原点中心にY軸180度回転して複製することにしました。
ブラウザでパート内に左右反転させるNURBSサーフェスが入っており、パートが選択されていることを確認します。
3DCGモードに切り替えます。
グリッドスナップを有効にして、ツールボックスの「作成」-「移動/複製」-「複製」-「数値入力」を選択します。
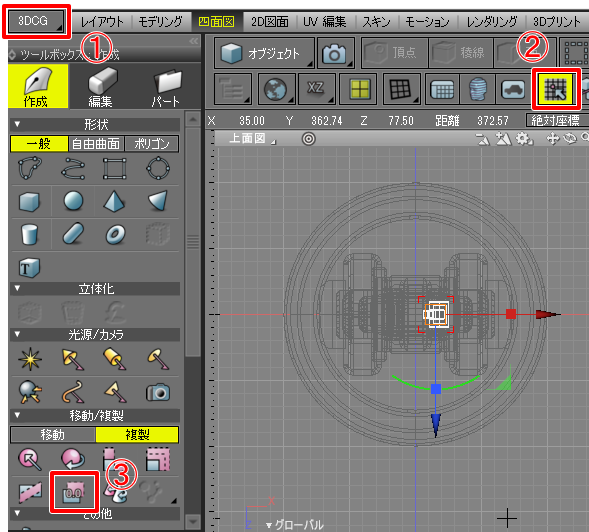
上面図で原点をクリックするとトランスフォーメーションウィンドウが表示されます。
回転Yで180を指定してOKボタンを押します。
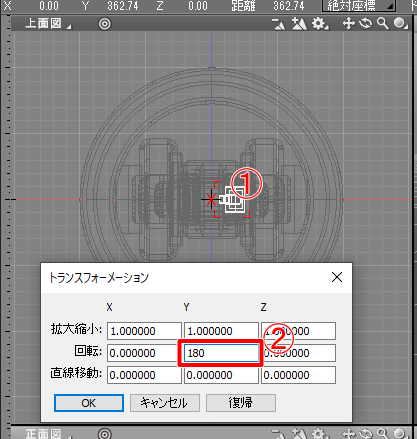
これで、左右反転した状態でアームの先端が複製されました。
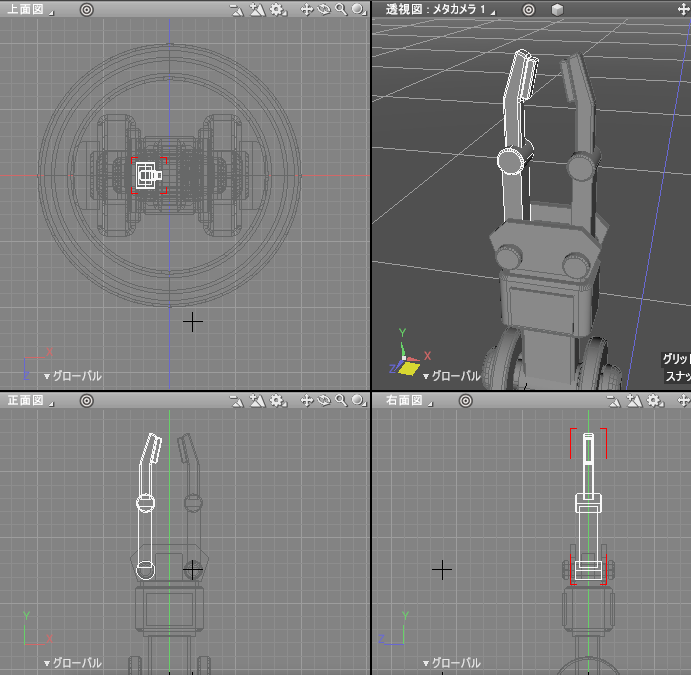
以上でロボットアームのモデリングが一通りできました。
背景を指定して仮レンダリング(パストレーシング+パストレーシング)すると以下のようになりました。
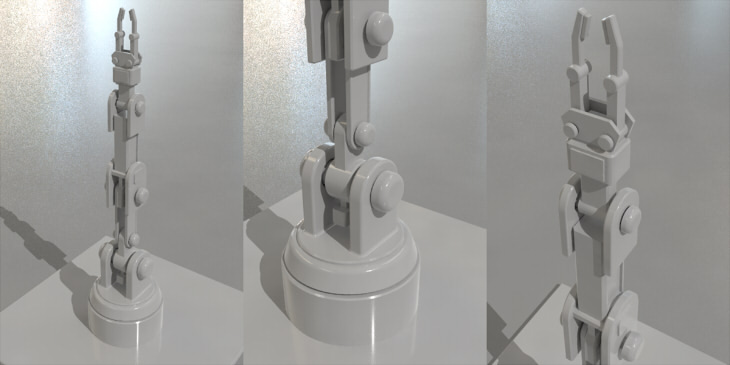
レンダリングについては次回説明します。
今回はここまでです。
今回使用したNURBSモデリングの機能は前回と大部分は同じです。
新しく以下の機能を使用しました。
- NURBSカーブで輪郭を作成し、押し出しでNURBSサーフェスを作成
- NURBSサーフェスの面を選択して「面の取り出し」
- 1枚の開いたNURBSサーフェスを「厚み」で立体化
NURBSモデリングをチュートリアルで3回分通してみて、ほぼ同じ機能を繰り返し使っていることがわかるかと思います。
また、角部分に面取りまたはフィレットを多用しています。
チュートリアルでのロボットアームのモデリングは、実際のハードウェアとの連携を目指しているわけではなくデザインとしてのものですが、
このような工業製品はNURBSでほとんど完結できそう、というのが掴めるかもしれません。
ここまでで、ポリゴンメッシュや自由曲面を使うことはありませんでした。
次回は、これらのNURBS形状のブラウザでの階層化、回転ジョイントを使用したポージング、
配線を線形状と自由曲面でモデリング、
マテリアルの割り当て、最後にライティングとレンダリングを行っていきます。